Predictive Collision Detection for the Dynamic Window Approach
Authors:
M. Missura, M. BennewitzType:
Conference ProceedingPublished in:
Proceedings of the IEEE International Conference on Robotics & Automation (ICRA)Year:
2019Links:
Abstract:
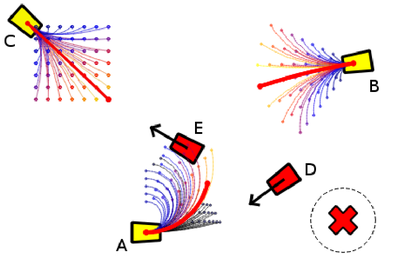
Foresighted navigation is an essential skill for robots to rise from rigid factory floor installations to much more versatile mobile robots that partake in our everyday environment. The current state of the art that provides this mobility to some extent is the Dynamic Window Approach combined with a global start-to-target path planner. However, neither the Dynamic Window Approach nor the path planner are equipped to predict the motion of other objects in the environment. We propose a change in the Dynamic Window Approach—a dynamic collision model—that is capable of predicting future collisions with the environment by also taking into account the motion of other objects. We show in simulated experiments that our new way of computing the Dynamic Window Approach significantly reduces the number of collisions in a dynamic setting with nonholonomic vehicles while still being computationally efficient.