Gradient and Log-based Active Learning for Semantic Segmentation of Crop and Weed for Agricultural Robots
Authors:
R. Sheikh, A. Milioto, P. Lottes, C. Stachniss, M. Bennewitz, T. SchultzType:
Conference ProceedingPublished in:
Proceedings of the IEEE International Conference on Robotics & Automation (ICRA)Year:
2020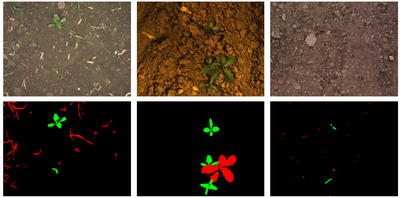
Abstract:
Annotated datasets are essential for supervised learning. However, annotating large datasets is a tedious and time-intensive task. This paper addresses active learning in the context of semantic segmentation with the goal of reducing the human labeling effort. Our application is agricultural robotics and we focus on the task of distinguishing between crop and weed plants from image data. A key challenge in this application is the transfer of an existing semantic segmentation CNN to a new field, in which growth stage, weeds, soil, and weather conditions differ. We propose a novel approach that, given a trained model on one field together with rough foreground segmentation, refines the network on a substantially different field providing an effective method of selecting samples to annotate for supporting the transfer. We evaluated our approach on two challenging datasets from the agricultural robotics domain and show that we achieve a higher accuracy with a smaller number of samples compared to random sampling as well as entropy based sampling, which consequently reduces the required human labeling effort