The Design of Self-Organizing Human-Swarm Intelligence
Authors:
J. Rockbach, M. BennewitzType:
ArticlePublished in:
Adaptive BehaviorYear:
2021DOI:
https://doi.org/10.1177/1059712311017550.Links:
BibTex String
@article{Hasbach21adaptive,
AUTHOR = {J. Hasbach and M. Bennewitz},
TITLE = {The Design of Self-Organizing Human-Swarm Intelligence},
YEAR = 2021,
JOURNAL = {Adaptive Behavior}
}
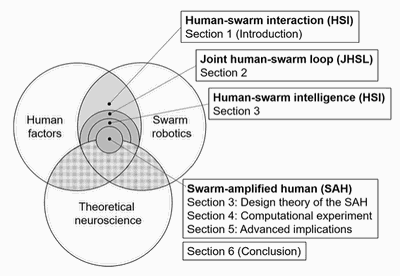
Abstract:
Human–swarm interaction is a frontier in the realms of swarm robotics and human-factors engineering. However, no holistic theory has been explicitly formulated that can inform how humans and robot swarms should interact through an interface while considering real-world demands, the relative capabilities of the components, as well as the desired joint-system behaviours. In this article, we apply a holistic perspective that we refer to as joint human–swarm loops, that is, a cybernetic system made of human, swarm and interface. We argue that a solution for human–swarm interaction should make the joint human–swarm loop an intelligent system that balances between centralized and decentralized control. The swarm-amplified human is suggested as a possible design that combines perspectives from swarm robotics, human-factors engineering and theoretical neuroscience to produce such a joint human–swarm loop. Essentially, it states that the robot swarm should be integrated into the human’s low-level nervous system function. This requires modelling both the robot swarm and the biological nervous system as self-organizing systems. We discuss multiple design implications that follow from the swarm-amplified human, including a computational experiment that shows how the robot swarm itself can be a self-organizing interface based on minimal computational logic.