Sensor-Based Navigation Using Hierarchical Reinforcement Learning
Authors:
C. Gebauer, N. Dengler, M. BennewitzType:
Conference ProceedingPublished in:
International Conference on Intelligent Autonomous Systems (IAS-17)Year:
2022Links:
Abstract:
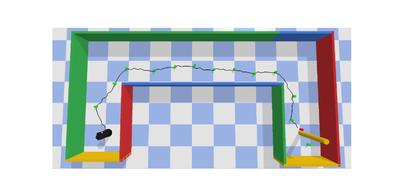
Robotic systems are nowadays capable of solving complex navigation tasks. However, their capabilities are limited to the knowledge of the designer and consequently lack generalizability to initially unconsidered situations. This makes deep reinforcement learning (DRL) especially interesting, as these algorithms promise a self-learning system only relying on feedback from the environment. In this paper, we consider the problem of lidar-based robot navigation in continuous action space using DRL without providing any goal-oriented or global information. By relying solely on local sensor data to solve navigation tasks, we design an agent that assigns its own waypoints based on intrinsic motivation. Our agent is able to learn goal-directed navigation behavior even when facing only sparse feedback, i.e., delayed rewards when reaching the target. To address this challenge and the complexity of the continuous action space, we deploy a hierarchical agent structure in which the exploration is distributed across multiple layers. Within the hierarchical structure, our agent self-assigns internal goals and learns to extract reasonable waypoints to reach the desired target position only based on local sensor data. In our experiments, we demonstrate the navigation capabilities of our agent in two environments and show that the hierarchical structure seriously improves the performance in terms of success rate and success weighted by path length in comparison to a flat structure. Furthermore, we provide a real-robot experiment to illustrate that the trained agent can be easily transferred to a real-world scenario.