Privacy Notice
You can find more information on the used cookies and how you can subsequently revoke your consent in our Privacy Policy.
@inproceedings{deheuvel23icar,
author={de Heuvel, Jorge and Shi, Weixian and Zeng, Xiangyu and Bennewitz, Maren},
booktitle={Proc. of the International Conference on Advanced Robotics (ICAR)},
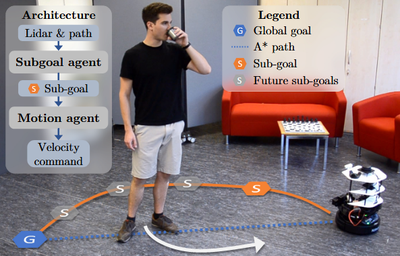
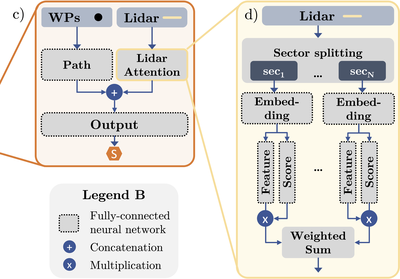
title={Subgoal-Driven Navigation in Dynamic Environments Using Attention-Based Deep Reinforcement Learning},
year={2023},
doi={10.1109/ICAR58858.2023.10406349}
}
You can find more information on the used cookies and how you can subsequently revoke your consent in our Privacy Policy.