Demonstration-Enhanced Adaptive Multi-Objective Robot Navigation
Authors:
J. de Heuvel, T. Sethuraman, M. BennewitzType:
PreprintPublished in:
Arxiv Pre-printYear:
2025Related Projects:
Embodied AI at LAMARR Institute for Machine Learning and Artificial Intelligence, PRIVATAR - Privacy-friendly Mobile Avatars for Sick School ChildrenLinks:
BibTex String
@article{deheuvel2025demo_morl,
title={Demonstration-Enhanced Adaptive Multi-Objective Robot Navigation},
author={Jorge de Heuvel and Tharun Sethuraman and Maren Bennewitz},
year={2025},
eprint={2404.04857},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
Abstract:
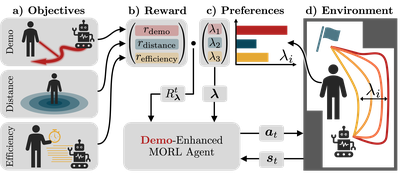
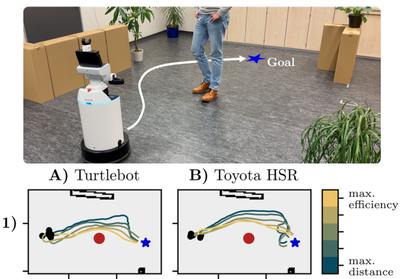
Preference-aligned robot navigation in human environments is typically achieved through learning-based approaches, utilizing user feedback or demonstrations for personalization.However, personal preferences are subject to change and might even be context-dependent.Yet traditional reinforcement learning (RL) approaches with static reward functions often fall short in adapting to varying user preferences, inevitably reflecting demonstrations once training is completed.This paper introduces a structured framework that combines demonstration-based learning with multi-objective reinforcement learning (MORL).To ensure real-world applicability, our approach allows for dynamic adaptation of the robot navigation policy to changing user preferences without retraining. It fluently modulates the amount of demonstration data reflection and other preference-related objectives.Through rigorous evaluations, including a baseline comparison and sim-to-real transfer on two robots, we demonstrate our framework's capability to adapt to user preferences accurately while achieving high navigational performance in terms of collision avoidance and goal pursuance.