Extended Swarming with Embodied Neural Computation for Human Control over Swarms
Authors:
J. Rockbach, M. BennewitzType:
Conference ProceedingPublished in:
International Conference on Simulation of Adaptive Behavior (SAB)Year:
2024Links:
BibTex String
@inproceedings{Rockbach24Simulation,
title={Extended Swarming with Embodied Neural Computation for Human Control over Swarms},
author={J. Rockbach and M. Bennewitz},
booktitle={Proc. of the International Conference on on Simulation of Adaptive Behavior(SAB)},
year={2024} }
Abstract:
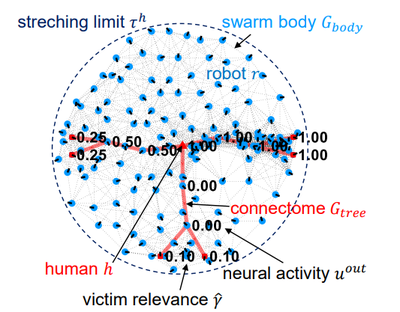
With the rise of robot swarms, it has become a relevant problem how humans can control them. Extended swarming is a potential approach in which robot swarms are treated as self-organising extensions of human bodies. Swarm control takes the form of controlling the observable swarm body while robot chains connect the human operator to relevant aspects of the environment. Inspired by how natural bodies are controlled by a nervous system, we here investigate how the swarm body’s self-organisation can be influenced by robot chains acting as embodied neural traces while remaining under human high-level control. Three design principles are proposed for such embodied neural computation. First, the swarm body’s self-organisation is controlled both by top-down human control and bottom-up sensor inputs alike to the hierarchical control architecture of the nervous system. Second, robots participating in robot chains are treated as rate-coded neurons rendering the chains as embodied neural traces which offers intuitive control possibilities for the human. Third, neural and swarm self-organisation are integrated by utilizing the swarm’s communication network as a scaffolding for neural function influencing swarm dynamics. This process is interpreted as embodied Hebbian learning. Human control over the swarm is demonstrated in a grid-based search-and-rescue simulation with the objective of selecting the most valuable subregion defined by accumulated victims in need. We evaluate how using embodied trace relevance in terms of neural activation improves completion time to finding the highest-value trace as well as how attracting units to relevant traces increases their robustness.