Temporal-Prior-Guided View Planning for Periodic 3D Plant Reconstruction
Authors:
S. Pan, X. Huang, M. BennewitzType:
Workshop PaperPublished in:
Active Perception Workshop in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)Year:
2025Related Projects:
AID4Crops - Automation and AI for Monitoring and Decision Making of Horticultural Crops, Phenorob - Robotics and Phenotyping for Sustainable Crop ProductionLinks:
Abstract:
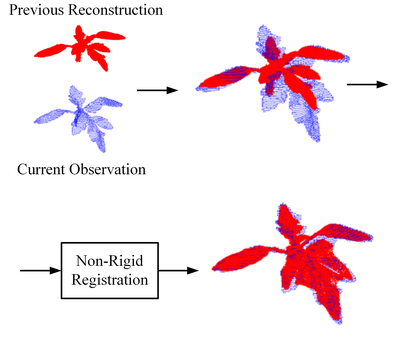
Periodic 3D reconstruction is essential for crop monitoring, but costly when each cycle restarts from scratch, wasting resources and ignoring information from previous captures. We propose temporal-prior–guided view planning for periodic plant reconstruction, in which a previously reconstructed model of the same plant is non-rigidly aligned to a new partial observation to form an approximation of the current geometry. To accommodate plant growth, we lightly inflate this approximation and solve a set covering optimization problem to compute a minimal set of views. We integrated this method into a combined pipeline that acquires one additional next-best view before registration for robustness and then plans a global path to reduce movement cost. Experiments on maize and tomato under hemisphere and sphere view spaces show that our system maintains or improves surface coverage while requiring fewer views and comparable movement cost compared to state-of-the-art baselines.