Designing Privacy-Preserving Visual Perception for Robot Navigation Based on User Privacy Preferences
Authors:
X. Huang, S. Pan, D. Reinhardt, M. BennewitzType:
PreprintPublished in:
Arxiv Pre-printYear:
2026Links:
BibTex String
@article{xuying26ppvp,
title={Designing Privacy-Preserving Visual Perception for Robot Navigation Based on User Privacy Preferences},
author={X. huang and S. Pan and D. Reinhardt and M. Bennewitz},
journal={arXiv preprint},
year={2026}
}
Abstract:
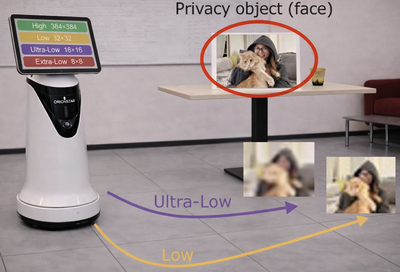
Visual navigation is a fundamental capability ofmobile service robots, yet the onboard cameras required forsuch navigation can capture privacy-sensitive information andraise user privacy concerns. Existing approaches to privacy-preserving navigation-oriented visual perception have largelybeen driven by technical considerations, with limited groundingin user privacy preferences. In this work, we propose auser-centered approach to designing privacy-preserving visualperception for robot navigation. To investigate how user privacypreferences can inform such design, we conducted two userstudies. The results show that users prefer privacy-preservingvisual abstractions and capture-time low-resolution preserva-tion mechanisms: their preferred RGB resolution dependsboth on the desired privacy level and robot proximity duringnavigation. Based on these findings, we further derive a user-configurable distance-to-resolution privacy policy for privacy-preserving robot visual navigation.