Hyperguider: Virtual reality framework for interactive path planning of quadruped robot in cluttered and multi-terrain environments
Authors:
I. Babataev, A. Fedoseev, NDW. Mudalige, E. Nazarova, D. TsetserukouType:
Conference ProceedingPublished in:
IEEE International Conference on Systems, Man, and Cybernetics (SMC)Year:
2022DOI:
https://doi.org/10.1109/SMC53654.2022.9945364Links:
BibTex String
@INPROCEEDINGS{9945364,
author={Babataev, Ildar and Fedoseev, Aleksey and Weerakkodi, Nipun and Nazarova, Elena and Tsetserukou, Dzmitry},
booktitle={2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC)},
title={HyperGuider: Virtual Reality Framework for Interactive Path Planning of Quadruped Robot in Cluttered and Multi-Terrain Environments},
year={2022},
volume={},
number={},
pages={2037-2042},
keywords={Navigation;Education;Virtual reality;Path planning;Quadrupedal robots;Task analysis;Cybernetics;Human-robot interaction;virtual reality;path planning;quadruped robot;user-centered interfaces},
doi={10.1109/SMC53654.2022.9945364}}
Abstract:
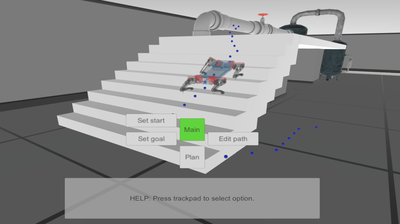
Quadruped platforms have become an active topic of research due to their high mobility and traversability in rough terrain. However, it is highly challenging to determine whether the clattered environment could be passed by the robot and how exactly its path should be calculated. Moreover, the calculated path may pass through areas with dynamic objects or environments that are dangerous for the robot or people around. Therefore, we propose a novel conceptual approach of teaching quadruped robots navigation through user-guided path planning in virtual reality (VR). Our system contains both global and local path planners, allowing robot to generate path through iterations of learning. The VR interface allows user to interact with environment and to assist quadruped robot in challenging scenarios.The results of comparison experiments show that cooperation between human and path planning algorithms can increase the computational speed of the algorithm by 35.58% in average, and non-critically increasing of the path length (average of 6.66%) in test scenario. Additionally, users described VR interface as not requiring physical demand (2.3 out of 10) and highly evaluated their performance (7.1 out of 10). The ability to find a less optimal but safer path remains in demand for the task of navigating in a cluttered and unstructured environment.