Loading
Anticipating Human Behavior
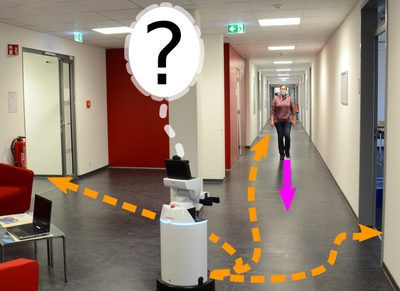
Assisting humans during everyday tasks is an important field of robotics. Possible tasks to be carried out by a service robot include support in sitting down or getting up, providing walking aids, fetching an object from an elevated board, or delivering objects. Whenever service robots are deployed in human environments, they have to adapt their behavior to the users. Planning appropriate actions in such environments requires to keep track of the user and to infer where, when, and for which tasks robot support is needed. Thus, to efficiently assist the user, a service robot must be able to anticipate the user’s intended navigation goals and trajectories. At the same time, the robot needs to navigate as well well as position itself in such a way that it is close to the user when help is requested while also minimizing interference with them. In the work planned within this proposal, we aim at developing a reliable prediction system for the user’s motions using a history of observations and predicting environment-specific trajectories. Furthermore, we plan to estimate where and when the help of the robot will actually be needed depending on anticipated user actions. Based on this knowledge, we will contribute new techniques to generate foresighted robot behavior. We will learn about user preferences and needs to realize foresighted service offering and optimize the robot’s behavior for user-aware positioning and navigation. We will thoroughly evaluate the developed techniques and compare them to state-of-the-art methods for human motion prediction and user-aware navigation. To conclude, the methods investigated in this project, will advance the area of user-aware navigation and foresighted service offering for assistance robots operating in human environments.

Project start date:
2017-01-04Project end date:
2024-12-31Funding:
Deutsche Forschungsgemeinschaft (DFG) - Projektnummer 313421352Associated Researchers:
Associated Student Assistants:
Loading
Loading