Bachelor
Project Group Humanoide Roboter
Humanoide Roboter sind momentan eine gefragte Forschungsplattform. Durch ihren menschlichen Körperbau sind sie bestens für den Einsatz in Umgebungen, die für Menschen geschaffen wurden, geeignet. Aktuelle humanoide Roboter können z.B. Treppen steigen, durch Räume mit vielen Hindernissen auf dem Boden laufen und Türen öffnen.
Im Rahmen dieser Projektgruppe sollen Algorithmen zur Wahrnehmung, Zustandsschätzung, Umgebungsrepräsentation, Navigation und Bewegungsplanung programmiert werden. Programmierprojekte, die zur freien Auswahl stehen, sind weiter unten aufgeführt.
Im Seminarteil werden aktuelle Publikationen aus dem Bereich der humanoiden Robotik in einer wissenschaftlichen Präsentation vorgestellt. Die Themen für den Seminarteil werden individuell mit der betreuenden Person ausgesucht.
Die verpflichtende Einführungsveranstaltung findet in Präsenz statt:
Datum: 11.10.2023, 14:00-15:00 Uhr
Raum: 2.025
| 11.10.2023, 14:00-15:00 Uhr (Raum 2.025) | Vorbesprechung (obligatorisch) [Präsentationsfolien] |
| 15.10.2023, Sonntag | Deadline für die Auswahl des Themas (online auf unserer Webseite) |
| 22.10.2023, Sonntag | Anmeldeschluss für die Prüfung in BASIS |
| 30.01.2024, Dienstag, 09:00-13:30 Uhr (Raum 2.025) | Präsentation des Seminarthemas |
| 27.03.2024, Mittwoch | Abschlusspräsentation des Praktikums und Abgabe der Dokumentation |
Nach der Einführungsveranstaltung können die Teilnehmer ihren Zeitplan in Absprache mit dem Betreuer selbst einteilen.
Anmeldung
Die Anmeldung ist geschlossen!
Themen
Für den Praktikumsteil stehen folgende Themen zur Auswahl.
Fußball


Auf dem Spielfeld liegt ein einfarbiger Ball vor einem durch zwei gelbe Pfosten markierten Tor. Der Roboter soll das Tor und den Ball mit seiner eingebauten Kamera erkennen, im richtigen Winkel zum Ball laufen und den Ball ins Tor schießen. Die Verhaltenssteuerung des Roboters wird erst in einer Simulation entwickelt und anschließend auf einen echten Roboter übertragen. Ein Software Framework, das die Simulation sowie eine Kommunikationsschnittstelle zum realen Roboter enthält, wird zur Verfügung gestellt.
Schwerpunkte: Bildverarbeitung und Computersehen, Bewegungsplanung, Navigation
Programmiersprache: C++
Systemanforderungen: Ubuntu Linux (20.04)
Turtlebot
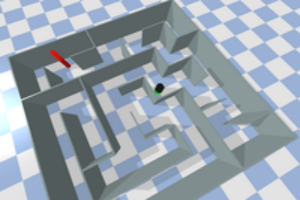

In diesen Projekt soll ein mobiler Roboter in einem geschlossenen Labyrinth ein einfarbiges Objekt finden. Der Roboter muss mit den eingebauten Tiefenkameras Wände erkennen und so kollisionsfrei die unbekannte Position des Objektes finden. Die Verhaltenssteuerung des Roboters wird erst in einer Simulation entwickelt und anschließend auf einen echten Roboter übertragen. Ein Software Framework, das die Simulation sowie eine Kommunikationsschnittstelle zum realen Roboter enthält, wird zur Verfügung gestellt.
Schwerpunkte: Bildverarbeitung, Navigation, Mapping
Programmiersprache: C++
Systemanforderungen: Ubuntu Linux (20.04)
Roboterarm
Für den Roboterarm bieten wir drei Projekte an. Bei allen wird zuerst die Verhaltenssteuerung des Roboters wird in einer Simulation entwickelt und anschließend auf einen echten Roboter übertragen. Ein Software-Framework, das die Simulation sowie eine Kommunikationsschnittstelle zum realen Roboter enthält, wird zur Verfügung gestellt.
Sortieren:
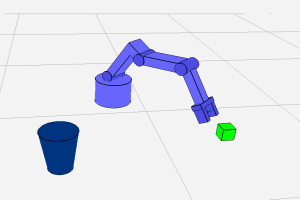

Bei diesem Projekt soll ein Roboterarm verschiedenfarbige Würfel greifen und in Becher sortieren.
Memory:

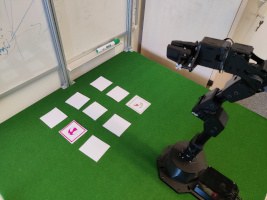
Bei diesem Projekt soll ein Roboterarm das Spiel "Memory" erlernen und verschiedenfarbige Plättchen greifen und miteinander vergleichen. Dafür müssen die vorhandenen Objekte zunächst im Sensorbild erkannt und voneinander unterschieden werden.
Sketch2Draw:
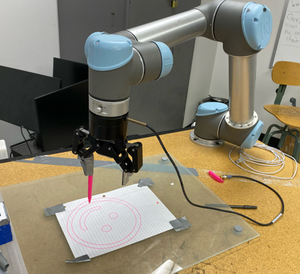
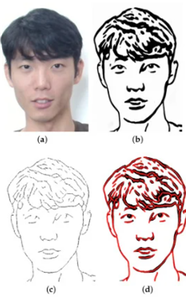
Bei diesem Projekt soll ein industrieller Roboterarm Skizzen zeichnen. An Hand eines gegebenen RGB Bildes müssen zunächst Konturen generiert werden. Anschließend werden die Konturen dazu verwendet, den Arm zu bewegen, sodass eine Skizze des Bildes entsteht.
Schwerpunkte: Bewegungsplanung, Bildverarbeitung
Programmiersprache: C++
Systemanforderungen: Ubuntu Linux (20.04)