Active Pose Estimation using Shape Priors
Thesis Degree:
MasterThesis Advisors:
Sicong PanThesis Description:
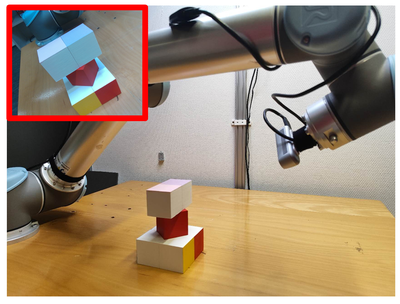
An example of camera 6D pose estimation is illustrated in figure. Given an image of an object and a robotic arm with a camera mounted at its end, the task is to estimate the camera pose from which the image was captured, starting from an initial pose.
When a 3D model of the object is available, such as a NeRF model, the problem has been explored in iNeRF [1]. However, if the object is unknown, the question arises: Is there an effective online search strategy? While a straightforward approach might involve using random search and using gradient-based optimization in the vicinity of the correct answer, such methods may not be efficient.
A promising direction is to introduce shape priors, which provide an intuitive way to guide the search process and improve efficiency.
Thesis Requirements:
Enrolled in computer science or similar MSc program in and around Bonn/Cologne
Familiarity with 3D perception and viewpoint planning
Experience with shape completion and deep learning
Programming experience with C++, Python, and ROS (Robot Operating System)
Enthusiasm for real-world robot deployment and scientific publishing of results
Thesis Related Work:
[1] Yen-Chen, Lin, et al. "iNeRF: Inverting Neural Radiance Fields for Pose Estimation." 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021