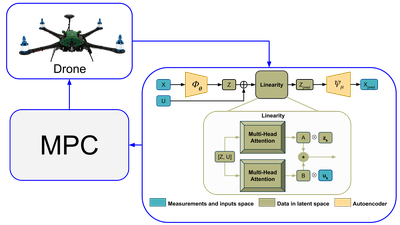
Linear Model Predictive Control for Quadrotors with Deep Koopman Operators
Thesis Degree:
MasterThesis Advisors:
Murad DawoodThesis Description:
This master's thesis focuses on developing a deep Koopman-based framework for learning and controlling the nonlinear dynamics of a quadrotor system. Unlike traditional methods such as Extended Dynamic Mode Decomposition (EDMD) [1, 2], which rely on predefined basis functions, this approach leverages deep neural networks to learn a more expressive Koopman operator directly from real-world drone data. The project involves data collection from a physical quadrotor, training a deep Koopman model, and implementing a Linear Model Predictive Control (LMPC) strategy. The final step is a comparative evaluation against classical EDMD and DMD-based controllers to assess improvements in model accuracy and control performance. This thesis offers an opportunity to work at the intersection of machine learning, control theory, and robotics, with potential applications in autonomous aerial systems.
Thesis Requirements:
Enrolled in computer science or similar MSc program in and around Bonn/Cologne
Familiarity with deep learning
Experience with controllers (PID, MPC, LQR)
Programming experience with C++, Python, and ROS (Robot Operating System)
Enthusiasm for real-world robot deployment and scientific publishing of results
Thesis Related Work:
[1] Rajkumar, Santosh M., et al. "Linear Model Predictive Control for Quadrotors with An Analytically Derived Koopman Model." arXiv preprint arXiv:2409.12374 (2024).
[2] Manaa, Zeyad M., et al. "Koopman-lqr controller for quadrotor uavs from data." 2024 IEEE International Conference on Smart Mobility (SM). IEEE, 2024.