Capture Steps: Robust Walking for Humanoid Robots
Authors:
M. Missura, M. Bennewitz, S. Behnke.Type:
Conference ProceedingPublished in:
International Journal of Humanoid Robotics (IJHR)Year:
2020Links:
Abstract:
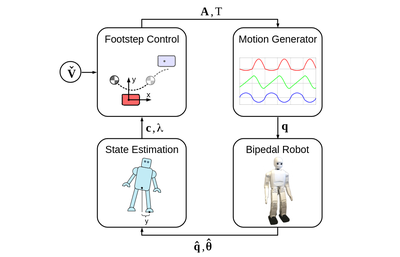
Stable bipedal walking is a key prerequisite for humanoid robots to reach their potential of being versatile helpers in our everyday environments. Bipedal walking is, however, a complex motion that requires the coordination of many degrees of freedom while it is also inherently unstable and sensitive to disturbances. The balance of a walking biped has to be constantly maintained. The most effective way of controlling balance are well timed and placed recovery steps—capture steps—that absorb the expense momentum gained from a push or a stumble. We present a bipedal gait generation framework that utilizes step timing and foot placement techniques in order to recover the balance of a biped even after strong disturbances. Our framework modifies the next footstep location instantly when responding to a disturbance and generates controllable omnidirectional walking using only very little sensing and computational power. We exploit the open-loop stability of a central pattern generated gait to fit a linear inverted pendulum model to the observed center of mass trajectory. Then, we use the fitted model to predict suitable footstep locations and timings in order to maintain balance while following a target walking velocity. Our experiments show qualitative and statistical evidence of one of the strongest push-recovery capabilities among humanoid robots to date