Prediction Maps for Real-Time 3D Footstep Planning in Dynamic Environments
Authors:
P. Karkowski, M. BennewitzType:
Conference ProceedingPublished in:
Proceedings of the IEEE International Conference on Robotics & Automation (ICRA)Year:
2019Links:
Abstract:
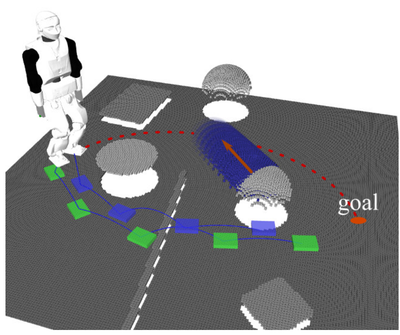
Perception of the local environment is a precondition for mobile robots to navigate safely in dynamic environments. Most robots, i.e., humanoids and smaller wheeled robots rely on planar regions. For humanoids, a simple 2D occupancy map as environment representation on which a path is planned is hereby not sufficient since they can step over and onto objects and therefore need height information. Considering dynamic obstacles introduces another level of complexity, since they can lead to necessary replanning or collisions at later stages. In this paper, we present a framework that first extracts planar regions in height maps and detects dynamic obstacles. Our system then uses this information to create a set of prediction maps, in which paths can be efficiently planned in real time at low CPU cost. We show in simulation and real-world experiments that our framework keeps run times well under 10 ms for one computation cycle and allows for foresighted real-time 3D footstep planning.