Plane Segmentation Using Depth-Dependent Flood Fill
Authors:
A. Roychoudhury, M. Missura, M. BennewitzType:
Conference ProceedingPublished in:
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)Year:
2021Links:
BibTex String
@InProceedings{Roychoudhury21iros,
author = {A. Roychoudhury and M. Missura and M. Bennewitz},
title = {Plane Segmentation Using Depth-Dependent Flood Fill},
booktitle = {Proc.~of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = 2021
}
Abstract:
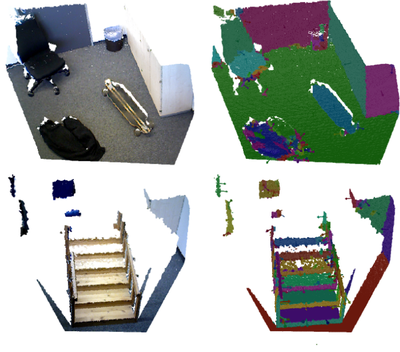
The detection of planar surfaces in a point cloud is a popular technique for the extraction of drivable or walkable surfaces and for tabletop segmentation. Unfortunately, RGB-D sensors are quite noisy and provide incomplete data, which makes the extraction of surfaces more challenging. Also, it is desirable to process the point cloud data in real time, which at a rate of approximately 30 Hz, leaves only a small amount of computation time per frame. We have already developed a real time-capable plane segmentation method [1] that exploits the organized structure of RGB-D point clouds in order to implement a computationally efficient region growing algorithm. It uses the point-plane distance to assign points to their segments rather than inherently unreliable surface normals. Now we are presenting an improvement where we adapt thresholds and other parameters of our algorithm to the measured depth in order to account for an increasing scatter of the points at larger distances from the camera. We estimate a minimum detectable plane size in pixels dependent on the measured depth. This enables us to stride in pixel coordinates with larger steps that are adaptive to the measured depth and to implement more robust sanity checks of depth-dependent size. Apart from a speed-up of the runtime of our algorithm, the segmentation quality also increased. We show a comparison between our improvement, our previous version, and other state-of-the-art methods evaluated on multiple commonly available datasets.