Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
Authors:
S. Yao, S. Pan, M. Bennewitz, K. HauserType:
PreprintPublished in:
Accepted to IEEE International Conference on Robotics & Automation (ICRA)Year:
2025Related Projects:
AID4Crops - Automation and AI for Monitoring and Decision Making of Horticultural Crops, Phenorob - Robotics and Phenotyping for Sustainable Crop ProductionLinks:
BibTex String
@inproceedings{yao2025icra,
title={Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits},
author={Yao, Shaoxiong and Pan, Sicong and Bennewitz, Maren and Hauser, Kris},
booktitle={Proc. of the IEEE International
Conference on Robotics and Automation (ICRA)}
year={2025}
}
Abstract:
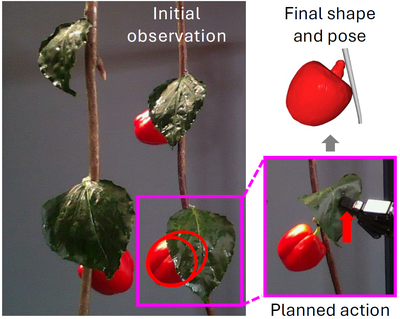
Fruit monitoring plays an important role in crop management, and rising global fruit consumption combined with labor shortages necessitates automated monitoring with robots. However, occlusions from plant foliage often hinder accurate shape and pose estimation. Therefore, we propose an active fruit shape and pose estimation method that physically manipulates occluding leaves to reveal hidden fruits. This paper introduces a framework that plans robot actions to maximize visibility and minimize leaf damage. We developed a novel scene-consistent shape completion technique to improve fruit estimation under heavy occlusion and utilize a perception-driven deformation graph model to predict leaf deformation during planning. Experiments on artificial and real sweet pepper plants demonstrate that our method enables robots to safely move leaves aside, exposing fruits for accurate shape and pose estimation, outperforming baseline methods. Project page: https://shaoxiongyao.github.io/lmap-ssc/.