Loading
Motion Planning and Navigation in Dynamic Environments
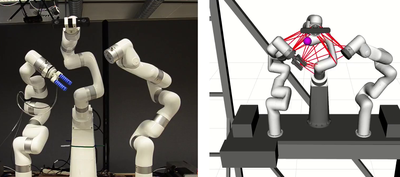
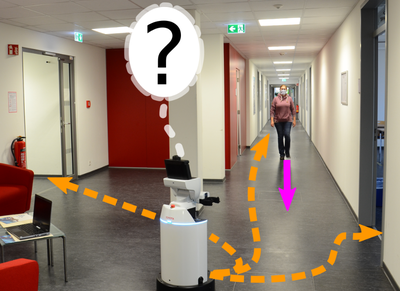
With robots, be it mobile bases, quadrupeds, humanoids, or mobile manipulators, being deployed in unstructured and constantly changing environments, we focus on developing algorithms for online reactive motion planning and obstacle avoidance.
Associated Researchers:
Related Projects:
Loading
Related Publications:
Loading