Bachelor
Project Group Humanoide Roboter
Humanoide Roboter sind momentan eine gefragte Forschungsplattform. Durch ihren menschlichen Körperbau sind sie bestens für den Einsatz in Umgebungen, die für Menschen geschaffen wurden, geeignet. Aktuelle humanoide Roboter können z.B. Treppen steigen, durch Räume mit vielen Hindernissen auf dem Boden laufen und Türen öffnen.
Im Rahmen dieser Projektgruppe sollen Algorithmen zur Wahrnehmung, Zustandsschätzung, Umgebungsrepräsentation, Navigation und Bewegungsplanung programmiert werden. Programmierprojekte, die zur freien Auswahl stehen, sind weiter unten aufgeführt.
Im Seminarteil werden aktuelle Publikationen aus dem Bereich der humanoiden Robotik in einer wissenschaftlichen Präsentation vorgestellt. Die Themen für den Seminarteil werden individuell mit der betreuenden Person ausgesucht.
Das Projekt und der Seminarteil gehen im Verhältnis 70 zu 30 in die Endnote ein.
Die verpflichtende Einführungsveranstaltung findet in Präsenz statt (siehe wichtige Informationen unten).
Links:
Wichtige Informationen:
Die Teilnahme an der Einführungsveranstaltung ist verpflichtend. Während der Veranstaltung werden wir die Projekte, den Zeitplan und den Anmeldeprozess präsentieren. Außerdem werden wir eure Fragen beantworten.
| 16.04.2024, 10:30-11:30 Uhr (Raum 0.107) | Einführungsveranstaltung (obligatorisch) [Slides] |
| 21.04.2024, Sonntag | Deadline für die Auswahl des Projekts (online auf unserer Webseite) |
| 25.04.2024, Donnerstag | Anmeldeschluss für die Prüfung in BASIS |
25.07.2024, 10:00-11:00 Uhr (Raum 2.025) | Zwischenpräsentation des Projekts |
| 04.07.2024, 09:30-12:40 Uhr (Raum 0.107) | Präsentation des Seminarthemas |
| 18.09.2024, 09:00-10:30h (Raum 0.027) | Abschlusspräsentation des Praktikums und Abgabe der Dokumentation |
Nach der Einführungsveranstaltung können die Teilnehmer ihren Zeitplan in Absprache mit dem Betreuer selbst einteilen.
Anmeldung:
Die Anmeldung ist geschlossen.
Report template
Bitte die folgende Vorlage für den Abschlussbericht verwenden:
Report template
Projekte:
Für den Praktikumsteil stehen folgende Projekte zur Auswahl.

Wo sind meine Sachen?
Die Aufgabe besteht darin, einen mobilen Roboter so zu programmieren, dass er eine Karte der Umgebung erstellt und darin Objekte von Interesse erkennt und markiert. Anschließend soll ein Pfad geplant und ausgeführt werden, der alle Objekte abfährt, feststellt, ob sie noch da sind, und die Ergebnisse zurückmeldet.

Lösen von Tangram-Puzzeln
Ziel des Projekts ist es, Tangram-Puzzles [1] mit Hilfe eines Roboterarms mit 2-Finger- oder Sauggreifer zu erzeugen und zusammenzusetzen. Die Eingabe für die Generierung ist ein Bild und die Montagereihenfolge muss bestimmt werden, um eine erfolgreiche Ausführung der Montage zu gewährleisten.
[1] https://en.wikipedia.org/wiki/Tangram

Schere, Stein, Paper
Die Aufgabe besteht darin, eine Version von Rock Paper Scissors auf unserer 5-Finger-Psyonic-Hand [1] zu implementieren.
[1] https://www.psyonic.io/ability-hand

Social Force Modell für die Simulation von Menschenmengen
Die Aufgabe besteht darin, das Social Force Model (SFM) für die Simulation von Menschenmengen zu implementieren und in einer 3D-Umgebung zu visualisieren.

Manipulation mit einem vierbeinigen Roboter
Das Ziel des Projektes ist es ein autonomes vierbeiniges Robotersystem zu entwickeln, welches in der Lage ist verschiedene Aufgaben wie Kartierung, Navigation, Objekterkennung und Manipulation von Objekten auszuführen.
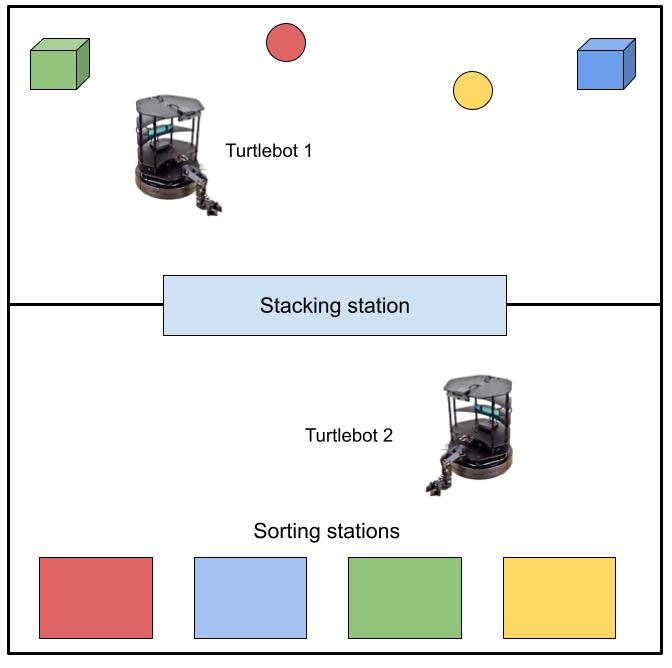
Kollaboratives System zum Stapeln und Sortieren mit mobilen Robotern
In diesem Projekt entwickeln Studierende ein kollaboratives System zum Stapeln und Sortieren von Objekten. Das System besteht aus zwei TurtleBots. Der erste Turtlebot hat die Aufgabe Würfel und Bälle zu sammeln, um diese an der ersten Station zu stapeln. Während der zweite Turtlebot die gestapelten Objekte nach ihrer Farbe in eine andere Station sortieren muss.