Project Group Humanoid Robots
Humanoide Roboter sind momentan eine gefragte Forschungsplattform. Durch ihren menschlichen Körperbau sind sie bestens für den Einsatz in Umgebungen, die für Menschen geschaffen wurden, geeignet. Aktuelle humanoide Roboter können z.B. Treppen steigen, durch Räume mit vielen Hindernissen auf dem Boden laufen und Türen öffnen.
Im Rahmen dieser Projektgruppe sollen Algorithmen zur Wahrnehmung, Zustandsschätzung, Umgebungsrepräsentation, Navigation und Bewegungsplanung programmiert werden. Programmierprojekte, die zur freien Auswahl stehen, sind weiter unten aufgeführt.
Im Seminarteil werden aktuelle Publikationen aus dem Bereich der humanoiden Robotik in einer wissenschaftlichen Präsentation vorgestellt. Die Themen für den Seminarteil werden individuell mit der betreuenden Person ausgesucht.
Das Projekt und der Seminarteil gehen im Verhältnis 70 zu 30 in die Endnote ein.
Die verpflichtende Einführungsveranstaltung findet in Präsenz statt (siehe wichtige Informationen unten).
Semester:
WSYear:
2024Course Number:
BA-INF 051Links:
BasisCourse Start Date:
09.10.2024Course End Date:
19.03.2025ECTS:
9Responsible HRL Lecturers:
Wichtige Informationen:
Die Teilnahme an der Einführungsveranstaltung ist verpflichtend. Während der Veranstaltung werden wir die Projekte, den Zeitplan und den Anmeldeprozess präsentieren. Außerdem werden wir eure Fragen beantworten.
| 09.10.2024, Wednesday, 10:00-11:00 Uhr, Raum 1.047 | Einführungsveranstaltung (obligatorisch) |
| 13.10.2024, Sonntag | Deadline für die Auswahl des Projekts (online auf unserer Webseite) |
| 20.10.2024, Sonntag | Anmeldeschluss für die Prüfung in BASIS |
22.01.2025, Mittwoch, 08:45-11:35 Uhr, Raum 0.016 | Präsentation des Seminarthemas |
| 23.01.2025, Donnerstag,, 10:00-10:40 Uhr, Raum 0.016 | Zwischenpräsentation des Projekts |
| 19.03.2025, Mittwoch | Abschlusspräsentation des Praktikums und Abgabe der Dokumentation |
Nach der Einführungsveranstaltung können die Teilnehmer ihren Zeitplan in Absprache mit dem Betreuer selbst einteilen.
Anmeldung:
Die Anmeldung ist geschlossen.
Bericht- und Präsentationsvorlage
Bitte die folgende Vorlage für den Abschlussbericht verwenden:
[Berichtsvorlage]
Bitte die folgende Vorlage für die Zwischen- und Abschlusspräsentation verwenden:
[Präsentationsvorlage]
Projekte:
Für den Praktikumsteil stehen folgende Projekte zur Auswahl.

Vierbeiniger Roboter im Hindernisparkour
Betreuung: Murad Dawood/Shahram Khorshidi
Das Ziel dieses Projektes ist es einem vierbeinigen Roboter das Navigieren durch einen Hindernisparkour beizubringen. Dabei soll der Roboter die Umgebung wahrnehmen und sein Verhalten an verschiedene Geschwindigkeiten, Hindernisse und Treppenstufen anpassen.
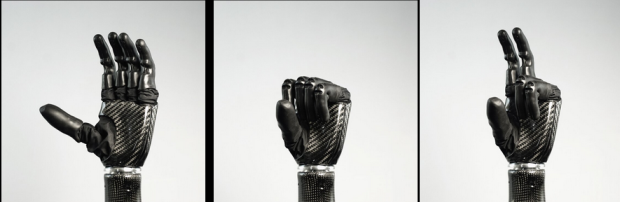
Schere, Stein, Paper
Betreuung: Nils Dengler
Die Aufgabe besteht darin, eine Version von Rock Paper Scissors auf unserer 5-Finger-Psyonic-Hand [1] zu implementieren.
[1] https://www.psyonic.io/ability-hand
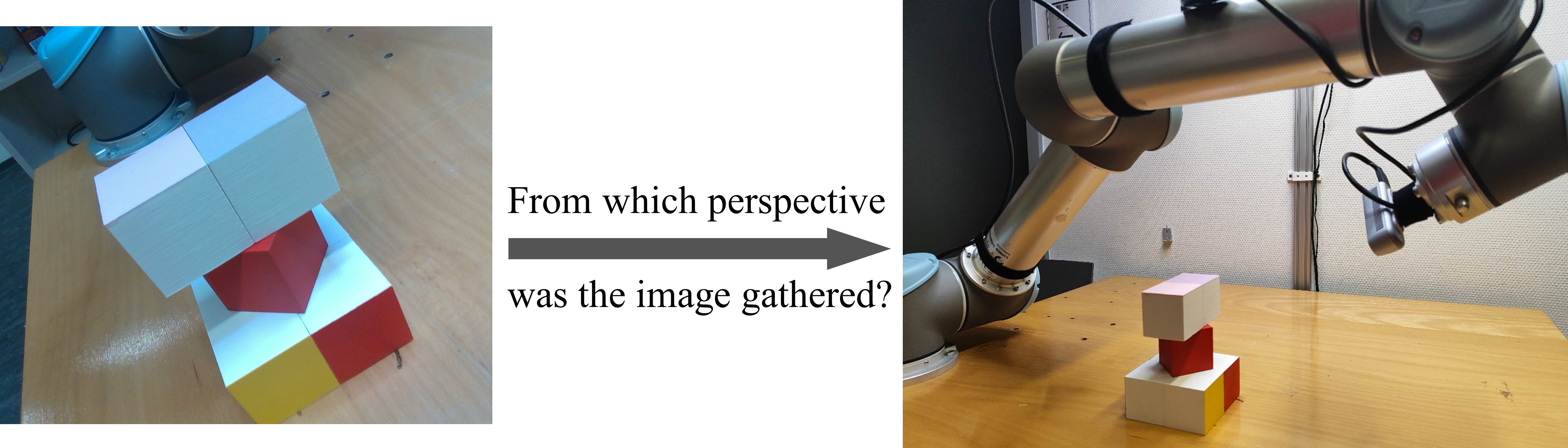
Finde den korrekten Blickwinkel!
Betreuung: Sicong Pan
Die Aufgabe besteht darin, anhand des gegebenen RGB-Bildes den Aufnahmeort herauszufinden. Dabei ist die Kamera in der Hand des Roboters montiert.
Social Force Modell für die Simulation von Menschenmengen
Betreuung: Subham Agrawal
Die Aufgabe besteht darin, das Social Force Model (SFM) für die Simulation von Menschenmengen zu implementieren und in einer 3D-Umgebung zu visualisieren.
Roboternavigation mit LLM
Betreuung: Xuying Huang
Das Ziel dieses Projektes ist es ein großes Sprachmodell (LLM) für die Roboternavigation zu verwenden. Der Roboter kann gesprochene Anweisungen verstehen, die Befehle mithilfe des LLMs verarbeiten und in konkrete Aktionen umsetzen (z. B. in die Küche gehen).