Active Semantic Navigation using Quadruped Robot
Thesis Degree:
MasterThesis Advisors:
Sicong PanXuying Huang
Shahram Khorshidi
Thesis Description:
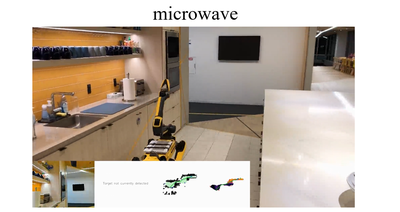
We want to reimplement the system VLFM in [1] on our quadruped robot GO1 and later on improve the system allowing search for two same objects.
The screenshot image of their video showcases an example of [1] for searching the microwave.
Thesis Requirements:
Enrolled in computer science or similar MSc program in and around Bonn/Cologne
Familiarity with mobile navigation and 3D perception
Experience with vision-language model and large language models
Programming experience with C++, Python, and ROS (Robot Operating System)
Enthusiasm for real-world robot deployment and scientific publishing of results
Thesis Related Work:
1. N. Yokoyama et al. "VLFM: Vision-Language Frontier Maps for Zero-Shot Semantic Navigation", ICRA, 2024 (Best Paper in Cognitive Robotics)